Domain: Double-Cart-Pole. More...
#include <double_cart_pole.h>
Public Member Functions | |
| size_t | inputs () const override |
| Number of inputs to a Brain. | |
| size_t | outputs () const override |
| Number of outputs from a Brain. | |
| bool | evaluatePopulation (darwin::Population *population) const override |
| Assigns fitness values to every genotype. More... | |
 Public Member Functions inherited from darwin::Domain Public Member Functions inherited from darwin::Domain | |
| virtual unique_ptr< core::PropertySet > | calibrateGenotype ([[maybe_unused]] const Genotype *genotype) const |
| Optional: additional fitness metrics (normally not used in the population evaluation, ie a test set) | |
Detailed Description
Domain: Double-Cart-Pole.
A variation of the cart-pole domain (cart_pole::CartPole), with two independent poles attached to the cart.
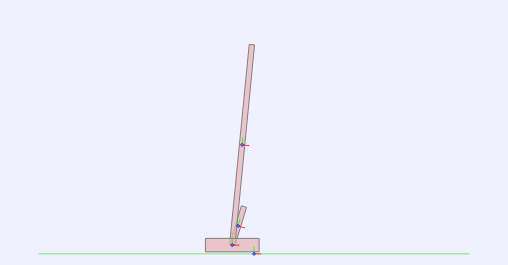
The cart starts in the middle (x = 0) and the initial pole angles is a random value in the [-max_initial_angle, +max_initial_angle] range. An episode is successful if both poles remain between -max_angle and +max_angle for at least max_steps. The cart position must also stay between [-max_distance, +max_distance].
Inputs
The inputs are configurable by individually selecting at least one of:
- pole_angle(1,2) (from vertical)
- angular_velocity(1,2)
- cart_distance (from the center)
- cart_velocity
| Input | Value |
|---|---|
| 0,1 | pole_angle(1,2) |
| 2,3 | angular_velocity(1,2) |
| 4 | cart_distance |
| 5 | cart_velocity |
Outputs
The single output indicates the horizontal force to be applied to the cart. This can be discrete (fixed +/-discrete_force_magnitude depending on the sign of the output) or can be continuous (the output value maps directly to the force magnitude)
| Output | Value |
|---|---|
| 0 | force |
Member Function Documentation
◆ evaluatePopulation()
|
overridevirtual |
Assigns fitness values to every genotype.
Having a good fitness function is a key part of evolutionary algorithms:
- Perhaps obvious, the fitness value should accurately estimate the quality of a particular solution
- A "smooth" distribution is preferable since it provides a gradient which can guide the incremental search in the solutions space. (ex. if most fitness values are 1.0 or 0.0 it's hard to know which genotypes are good candidates for reproduction)
- Returns
trueif the evolution goal was reached
Implements darwin::Domain.
The documentation for this class was generated from the following files:
- C:/Users/lemo/work/darwin/domains/double_cart_pole/double_cart_pole.h
- C:/Users/lemo/work/darwin/domains/double_cart_pole/double_cart_pole.cpp
